

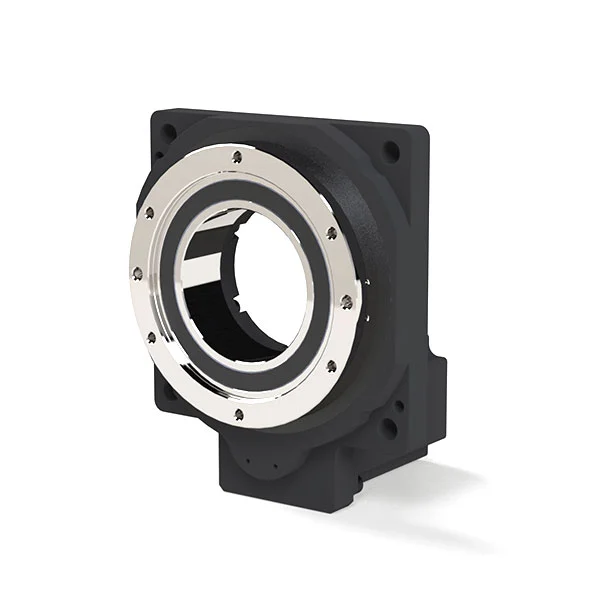

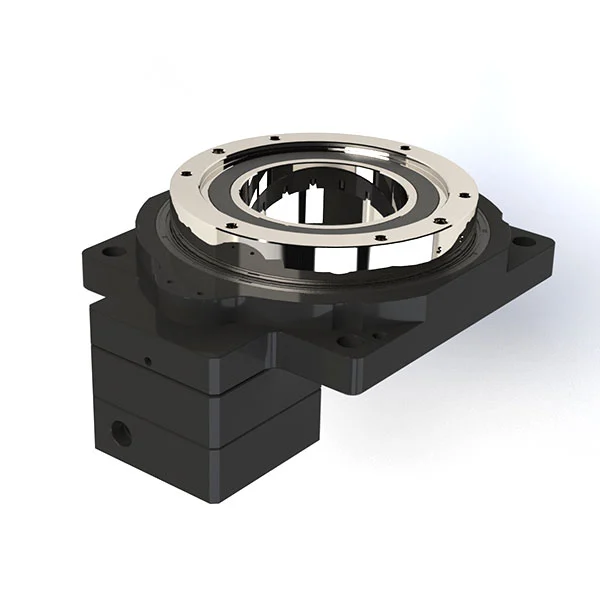



空心旋转平台使用高精度的齿轮结构和径向轴承来提高扭矩和刚性,从而实现了更稳定的负载轴承。当与伺服电动机或步进电动机配对时,它可以执行任意角度划分。它不仅符合索引器无法实现的数字控制,而且具有与直接驱动电机相当的定位精度,并且可以在短时间内实现惯性负载的定位。
空心旋转平台的安装说明
 首先,确认电动机是否与平台匹配并在表面上删除异物。 |
② 卸下过渡法兰上的平端螺钉,然后旋转输入端以调节位置,直到可以看到锁定环的固定螺栓。 |
③ 将电动机轴与还原端对齐,将其插入还原器,然后将连接的螺栓对角线前进行。 |
 拧紧锁定环并拧紧螺栓;请参阅下表以获取扭矩。 |
⑤ 用扭矩扳手对角线拧紧固定螺钉。请参阅下面的扭矩表。 |
⑥ 拧紧扁平螺钉。 |
轴套筒的安装

空心旋转平台的选择点
计算要运输对象的负载/惯性(JW)
要运输的物体的惯性应小于传输设备标准设备的30倍。
输出端
■计算加速扭矩(TA)
请参阅以下公式:
加速扭矩t [n·m] =(JM + JW) *π/30 *(n₂ -n₁)/t₁)
其中JM:电动机的惯性[kg·m²]; JA:机制的惯性[kg·m²]; JW:负载的惯性[kg·m²]; N₂:运行速度[R/分钟]; n₁:起始速度[r/min]; T₁:加速度(减速)时间[S]。
■计算所需扭矩
通过乘以摩擦阻抗引起的负载扭矩和惯性引起的加速扭矩来计算所需的扭矩。
所需的扭矩t =(负载扭矩[N·M] +加速扭矩[N·M])×安全系数=(TL + TA)×S×S。安全系数S大于1.5。
■选择电动机
电动机所需的扭矩T必须在速度扭力的规范范围内。
步进电动机的速度值曲线。
地址
No. 148 Dongfeng Village, Xiaoshan District, Hangzhou City, Zhejiang Province, China












